STUDY & VIBRATION ANALYSIS OF GRADUAL DECREASE BEAM BY FEM
 IAEME Publication
IAEME Publicationvisibility
…
description
14 pages
link
1 file
Sign up for access to the world's latest research
checkGet notified about relevant papers
checkSave papers to use in your research
checkJoin the discussion with peers
checkTrack your impact
Abstract
In this study the important member beam are used as structural components and it can be classified according to their geometric configuration as uniform or taper and slender or thick. If practically analyzed, the non-uniform beams provide a better distribution of mass and strength than uniform beams and can meet special functional requirements in architecture, aeronautics, robotics, and other innovative engineering applications. Design of such structures is important to resist dynamic forces, such as wind and earthquakes. It requires the basic knowledge of natural frequencies and mode shapes of those structures. In this research work, the equation of motion of a double tapered cantilever Euler beam is derived to find out the natural frequencies of the structure. Finite element formulation has been done by using Weighted residual and Galerkin's method. Natural frequencies and mode shapes are obtained for different taper ratios. The effect of taper ratio on natural frequencies and mode shapes are evaluated and compared.
Figures (6)


Related papers
Model Analysis of Variation of Taper Angle for Cantilever and Simply Supported Beam
2015
Beams are very common types of structural components and it can be classified according to beams and can meet special functional requirements i n architecture, aeronautics, robotics, their geometric configuration as uniform or taper and slender or thick. If practically analyzed, the non-uniform beams provide a better distribution of mass and strength than uniform and other innovative engineering applications. Design of such structures is important to resist dynamic forces, such as wind and earthquakes. It requires the basic knowledge of natural frequencies and mode shapes of those structures. In this research work, the equation of motion of a double tapered cantilever Euler beam is derived to find out the natural frequencies of the structure. Finite element formulation has been done by using Weighted residual and Gale kin‟s method. Natural frequencies and mode shapes are obtained for different taper ratios. The effect of taper ratio on natural frequencies and mode shapes are evaluat...
Modal analysis of cantilever beam Structure Using Finite Element analysis and Experimental Analysis
The modal analysis is presented in this paper some basic concepts of modal analysis of transverse vibration of fixed free beam. It is described an experimental apparatus and the associated theory which allows to obtain the natural frequencies and modes of vibration of a cantilever beam. The concept of modal analysis plays an important role in the design of practical mechanical system. So it becomes important to study its effects on mechanical system for different frequency domain i.e. low, medium and high frequency. This paper focuses on the numerical analysis and experimental analysis of transverse vibration of fixed free beam and investigates the mode shape frequency. All the frequency values are analyzed with the numerical approach method by using ANSYS finite element package has been used. The numerical results are in good agreement with the experimental tests results.
Modal Analysis of Cantilever Beam Using Analytical and Finite Element Method
2021
This paper represents theoretical modal analysis of a cantilever beam using Euler-Bernoulli beam theory and finite element analysis is performed which allows to obtain the modes of vibration and natural frequencies of a cantilever beam. While designing mechanical system, the modal analysis plays a crucial role. The paper presents the numerical approach method using ANSYS workbench to analyse all the natural frequency of the beam and analytical method using Euler-Bernoulli theory and MATLAB is used to represent the mode shapes. This analysis is done to compare the results obtained by the above mentioned tools. The results shows that there are minute errors found after comparison and that can be neglected. So the analytical results are found to be same as ANSYS workbench results.
COMPARATIVE ANALYSIS OF NATURAL FREQUENCY FOR CANTILEVER BEAM THROUGH ANALYTICAL AND SOFTWARE APPROACH
Beam is a inclined or horizontal structural member casing a distance among one or additional supports, and carrying vertical loads across (transverse to) its longitudinal axis, as a purling, girder or rafter. Flexible structures usually have low flexible rigidity and small material damping ratio. A little excitation may lead to destructive large amplitude vibration and long settling time. These can result in fatigue, instability and poor operation of the structures. Vibration control of flexible structures is an important issue in many engineering applications, especially for the precise operation performances in aerospace systems, satellites, flexible manipulators, etc. Beams and beam like elements are main constituent of structures and widely used in aerospace, high speed machinery, light weight structure, etc and experience a wide variety of static and dynamic loads of certain frequency of vibration which leads to its failure due to resonance. Vibration testing has become a standard procedure in design and development of most engineering systems. The system under free vibration will vibrate at one or more of its natural frequencies, which is the characteristic of the dynamical nature of system. The natural frequency is independent of damping force because the effect of damping on natural frequency is very small.
Finite element free and forced vibration analysis of gradient elastic beam structures
Acta Mechanica, 2018
The dynamic stiffness matrix of a gradient elastic flexural Bernoulli-Euler beam finite element is analytically constructed with the aid of the basic and governing equations of motion in the frequency domain. The simple gradient theory of elasticity is used with just one material constant (internal length) in addition to the classical moduli. The flexural element has one node at every end with three degrees of freedom per node, i.e., the displacement, the slope, and the curvature. Use of this dynamic stiffness matrix for a plane system of beams enables one by a finite element analysis to determine its dynamic response harmonically varying with time external load or the natural frequencies and modal shapes of that system. The response to transient loading is obtained with the aid of Laplace transform with respect to time. A stiffness matrix is constructed in the transformed domain, the problem is formulated and solved by the finite element method, and the time domain response is finally obtained by a time domain inversion of the transform solution. Because the exact solution of the governing equation of motion in the frequency domain is used as the displacement function, the resulting dynamic stiffness matrices and the obtained structural response or natural frequencies and modal shapes are also exact. Examples are presented to illustrate the method and demonstrate its advantages. The effects of the microstructure on the dynamic behavior of beam structures are also determined.
Natural Frequencies of a Tapered Cantilever Beam of Constant Thickness and Linearly Tapered Width
A method for determination of natural frequencies of a tapered cantilever beam in free bending vibration by a rigid multibody system is proposed. The considerations are performed in the frame of Euler-Bernoulli beam theory. The method consists of two steps. In the first step, the tapered cantilever beam is approximated by n flexible straight beam, and after that all of the n segments are divided into k segments. In the second step, all of the flexible straight beams are replaced by three rigid beams connected through revolute and prismatic joints with the corresponding springs in them. The results of the proposed method are compared with similar methods proposed in literature.
Natural Frequencies of The Hollow Cantilever Beam With Tip Mass
Journal of emerging technologies and innovative research, 2020
In general for calculation of natural frequencies discrete system model is used. In case of cantilever beam with tip mass, transverse stiffness of the beam and tip mass is used to calculate natural frequency of the beam. This method may generate wrong value of 1 st natural frequency. In addition to this it is not possible calculate higher natural frequencies of the beam with 1 DOF model. In this paper natural frequencies of the cantilever beam with tip mass are calculated using Euler-Bernoulli beam theory. Mathematical model to calculate natural frequencies is given. 1 st natural frequencies of the beam for various mass ratios are obtained using ANSYS modal analysis module. In addition to this natural frequencies of the beam for various mass ratios considering system as 1 DOF are calculated. Results obtained from all three methods are compared. For lower mass ratios 1 DOF model shows higher values of natural frequencies than continuous system. At higher values of mass ratio natural frequencies obtained from all the three models shows less variation.
International Journal of Mechanical Engineering and Technology (IJMET)
Volume 9, Issue 1, January 2018, pp. 431–444, Article ID: IJMET_09_01_047
Available online at http://www.iaeme.com/IJMET/issues.asp?JType=IJMET&VType=9&IType=1
ISSN Print: 0976-6340 and ISSN Online: 0976-6359
© IAEME Publication
Scopus Indexed
STUDY & VIBRATION ANALYSIS OF
GRADUAL DECREASE BEAM BY FEM
Mani Kant
M.Tech. Scholar, Dept. of Mechanical Engineering, SHUATS, Allahabad, U.P., India
Dr. Prabhat Kumar Sinha
Assistant Professor, Department of Mechanical Engineering, SHUATS Allahabad, U.P., India
ABSTRACT
In this study the important member beam are used as structural components and it
can be classified according to their geometric configuration as uniform or taper and
slender or thick. If practically analyzed, the non-uniform beams provide a better
distribution of mass and strength than uniform beams and can meet special functional
requirements in architecture, aeronautics, robotics, and other innovative engineering
applications. Design of such structures is important to resist dynamic forces, such as
wind and earthquakes. It requires the basic knowledge of natural frequencies and
mode shapes of those structures. In this research work, the equation of motion of a
double tapered cantilever Euler beam is derived to find out the natural frequencies of
the structure. Finite element formulation has been done by using Weighted residual
and Galerkin’s method. Natural frequencies and mode shapes are obtained for
different taper ratios. The effect of taper ratio on natural frequencies and mode shapes
are evaluated and compared.
Keywords: natural frequencies, mode shapes, Finite element formulation, Weighted
residual and Galerkin’s method, mode shapes
Cite this Article: Mani Kant and Dr. Prabhat Kumar Sinha, Study & Vibration
Analysis of gradual decrease Beam by FEM, International Journal of Mechanical
Engineering and Technology 9(1), 2018. pp. 431–444.
http://www.iaeme.com/IJMET/issues.asp?JType=IJMET&VType=9&IType=1
1. INTRODUCTION
It is well known that beams are very common types of structural components and can be
classified according to their geometric configuration as uniform or tapered, and slender or
thick. It has been used in many engineering applications and a large number of studies can be
found in literature about transverse vibration of uniform isotropic beams. But if practically
analyzed, the non-uniform beams may provide a better or more suitable distribution of mass
and strength than uniform beams and therefore can meet special functional requirements in
architecture, aeronautics, robotics, and other innovative engineering applications and they has
http://www.iaeme.com/IJMET/index.asp
431
editor@iaeme.com
Mani Kant and Dr. Prabhat Kumar Sinha
been the subject of numerous studies. Non-prismatic members are increasingly being used in
diversities as for their economic, aesthetic, and other considerations. Design of such structures
to resist dynamic forces, such as wind and earthquakes, requires a knowledge of their natural
frequencies and the mode shapes of vibration. The vibration of gradual decrease Beam
linearly in either the horizontal or the vertical plane finds wide application for electrical
contacts and for springs in electromechanical devices. For the gradual decrease Beam
vibration analysis Euler beam theory is used. Free vibration analysis that has been done in
here is a process of describing a structure in terms of its natural characteristics which are the
frequency and mode shapes. There have been many methods developed yet now for
calculating the frequencies and mode shapes of beam. Due to advancement in computational
techniques and availability of software, FEA is quite a less cumbersome than the conventional
methods. Prior to development of the Finite Element Method, there existed an approximation
technique for solving differential equations called the Method of Weighted Residuals (MWR).
This method is presented as an introduction, before using a particular subclass of MWR, the
Galerkin’s Method of Weighted Residuals, to derive the element equations for the finite
element method. These formulations have displacements and rotations as the primary nodal
variables; to satisfy the continuity requirement each node has both deflection and slope as
nodal variables. Since there are four nodal variables for the beam element, a cubic polynomial
function is assumed. The clamped free beam that is being considered here is assumed to be
homogeneous and isotropic. The effects of taper ratio on the fundamental frequency and mode
shapes are shown in with comparison for clamped-free and simply supported beam via graphs
and tables. These results are then compared with the available analytical solutions. Bailey,
presented the analytical solution for the vibration of non-uniform beams with and without
discontinuities and incorporating various boundary conditions. Results obtained were
compared with the existing results for certain cases. It has been shown that the direct solution
converges to the exact solution. C. W. S. To, derived the explicit expressions for mass and
stiffness matrices of two higher order gradual decrease Beam elements for vibration analysis.
One possesses three degrees of freedom per node and the other four degrees of freedom per
node. The Eigen values obtained by employing the higher order elements converge more
rapidly to the exact solution than those obtained by using the lower order one. Lau, calculated
the first five natural frequencies and tabulated for a non- uniform cantilever beam with a mass
at the free end based on Euler theory. The formulation of each element involves the
determination of gradients of potential and kinetic energy functions with respect to a set of
coordinates defining the displacements at the ends or nodes of the elements.
Research Objectives
•
•
•
To formulate of governing differential equation of motion of linearly gradual decrease
Euler-Bernoulli beam of rectangular cross-section.
To deriving the elemental mass and stiffness matrices by the Hermitian shape
functions and Galerkin’s method for by Finite Element Analysis.
To free vibration analysis of gradual decrease Beam.
2. MODELING OF GRADUAL DECREASE BEAM
Linearly gradual decrease Beam element
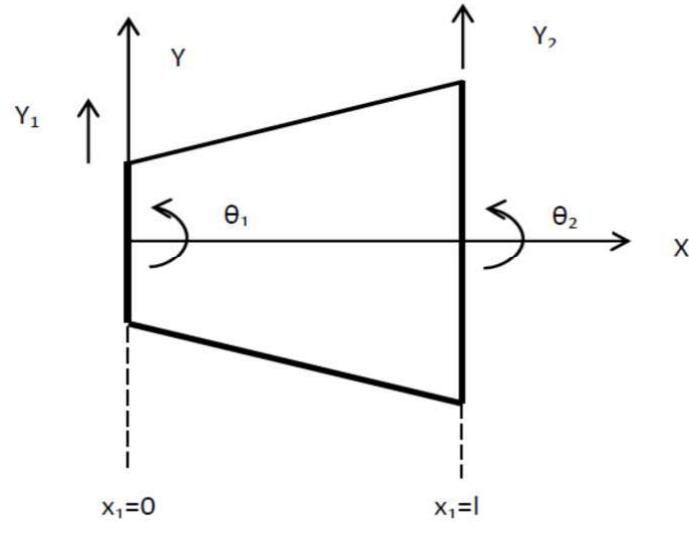
The beam element is assumed to be associated with two degrees of freedom, one rotation and
one translation at each node. The location and positive directions of these displacements in a
typical linearly gradual decrease Beam element are shown in Fig. 3.1 Some commonly used
cross-sectional shapes of beams are shown in Table 3.1. The depth of the cross sections at
http://www.iaeme.com/IJMET/index.asp
432
editor@iaeme.com
Study & Vibration Analysis of gradual decrease Beam by FEM
ends are represented by h1 (at free end) and h0 (at fixed end) similarly the width at the both
ends are represented by b1 (at free end) and b0 (at fixed end) respectively. The length of the
element is l. The axis about which bending is assumed to take place is indicated by a line in
the middle coinciding with the neutral axis.
Figure 1 The location and positive directions of these displacements in a typical linearly gradual
decrease Beam element.
For most of the beam shapes the variation in cross-sectional area along the length is
represented by the following equation
1
The variation in the moment of inertia along the length about the axis of bending is given
as
1
Where
1
Ax and Ix are the cross sectional area and moment of inertia at distance x from the small
end; A1 and I1 and A0 and I0 are the cross sectional area and moment of inertia at free end
and fixed end; and m and n refer to the corresponding shape factors that depends on the crosssectional shape and dimensions of the beam. The shape factors can be evaluated theoretically
by observing the Eq. (3.1) and (3.2). Now by applying the condition for the beam as Ax=A0
and Ix=I0 at x=l, the condition gives the following equation
In
In
,
In
In
Thus, the shape factors can be found easily irrespective of the cross-section using the
dimensions of at the two ends. Calculation of values of shape factors (m and n) from Eq. 3. 4
reveals that the expressions for Ax and Ix are exact at both ends of the beam. In some cases as
for beams of I-section (Table 3.1), it has been found that, at points in between along the beam,
Ax and Ix will deviate slightly from true values. The degree of this deviation is very small and
for beams of all usual proportions, Eq. 3.1 and 3.2 gives values of area and moment of inertia
at every section along the beam within one percent of deviation, which can be neglected, of
the exact values. The shape factors m and n are dimensionless quantities; m and n varies
between the limits 2.2-2.8.
http://www.iaeme.com/IJMET/index.asp
433
editor@iaeme.com
Mani Kant and Dr. Prabhat Kumar Sinha
For theoretical analysis a rectangular cross-sectioned beam with linear variable width and
depth is considered.
Formulation of governing differential equation of gradual decrease Beam
A general Euler’s Bernoulli beam is considered which is tapered linearly in both horizontal as
well as in vertical planes. Fig. 3.2 shows the variation of width and depth in top and front
view.
The fundamental beam vibrating equation for Bernoulli-Euler is given by
"
!
! 0
$
#
The width and depth are varying linearly given by
&
&)
'& ⁄ ', ) )
) '& ⁄ '
Similarly area and moment of inertia will be varying accordingly
&)
& ' [
&
'& ⁄ '][)
) '& ⁄ '],
1
& '
&)
[)
) '& ⁄ '][
&
'& ⁄ ']12
All the expressions for the beam area and moment of inertia at any cross-section are
written after considering the variation along the length to be linear. Where ρ is the weight
density, A is the area, and together ‘ρA/g’ is the mass per unit length, E is the modulus of
elasticity and ‘I’ is the moment of inertia and l is the length of the beam.
Here we considered only the free vibration, so considering the motion to be of form y(x, t)
=z(x) sin (ωt), so applying the following relation to the fundamental beam equation we get
.
"
!
&/ .'
#
Substituting Eq. (3.7) and (3.8) into (3.4), and by letting u = x/l (where u varies from 0 to
1) the following equation is obtained
'
) '
3&
&)
0 1 . 20 - .
3
5
1
&
&)
'2 )
) '2
02
02
&)
&
60 .
) '&
'
'
7
8
&)
&
&
'2] [
'2]
) '2][
02 [)
12 1 Ω
1
3
5 .
# [ℎ + (ℎ − ℎ )2]
By proper approximation i.e. α=h0/h1 and β=b0/b1 and k 12/ / #
gets transformed into Eq. 11
(; − 1)
0 1 . 20 - . 3&: 1)
3
+
5
1
02
02 1 + (: − 1)2 1 + (; − 1)2
(; − 1)(: − 1)
(: − 1)
60 .
+
7
+
8
02 [1 + (: − 1)2][1 + (; − 1)2] [1 + (: − 1)2]
( <) .
8
=7
[1 + (: − 1)2]
above equation
The Eq. 3.10 is the final equation of motion for a double-tapered beam with rectangular
cross-section. It was solved by numerical integration to give values of (lk) for various taper
ratios for clamped-free beam with boundary conditions i.e. at x= 0 or u = 0, d2z/du2= 0 and z=
http://www.iaeme.com/IJMET/index.asp
434
editor@iaeme.com
Study & Vibration Analysis of gradual decrease Beam by FEM
0, at x= l or u= 1, dz/du= 0 and z= 0. This after solving leads to = < ℎ =
>?
@
. The relation
can be used as a comparison while solving with FEA to show the effect of taper ratio on the
fundamental frequencies and mode shapes.
3. FINITE ELEMENT ANALYSIS
Most numerical techniques lead to solutions that yield approximate values of unknown
quantities i.e. displacements and stiffness, only at selected points in a body. A body can be
discretized into an equivalent system of smaller bodies. The assemblage of such bodies
represents the whole body. Each subsystem is solved individually and the results so obtained
are then contained are then combined to obtain solution for the whole body. It is applicable to
wide range of problems involving non-homogeneous materials, nonlinear stress-strain
relations, and complicated boundary conditions. Such problems are usually tackled by one of
the three approaches, namely (i) displacement method or stiffness method (ii) the equilibrium
or force method and (iii) mixed method. The displacement method, to which we shall confine
our discussion, is widely used because of the simplicity with which it can be handled on the
computer.
In the displacement approach, a structure is divided into a number of finite elements and
the elements are interconnected at joints called as nodes. The displacements in each element
are then represented by simple functions. A displacement function is generally expressed in
terms of polynomial. From the convergence point of view such a function is so chosen that it
1. Is continuous within the elements and compatible between the adjacent elements.
2. It includes the rigid body displacements and rotations of an element.
3. Has a consistent strain state.
Further while choosing the polynomial for the displacement function, the order of the
polynomial has to be chosen very carefully.
Shape function
The analysis of two dimensional beams using finite element formulation is identical to matrix
analysis of structures. The Euler-Bernoulli beam equation is based on the assumption that the
plane normal to the neutral axis before deformation remains normal to the neutral axis after
deformation. Since there are four nodal variables for the beam element, a cubic polynomial
function for y(x), is assumed as
( )=A +A +A
+ A- From the assumption for the Euler-Bernoulli beam, slope is computed from Eq. (3.1) is
B( ) = A + 2A + 3CWhere α0, α1, α2, α3 are the constants The Eq. (3.1) can be written as
:
:
- ] D E, Y(x) = [C][:]
& ' [1
:
:Where,
:
:
- ]and[α]= D E
[C] = [1
:
:-
http://www.iaeme.com/IJMET/index.asp
435
editor@iaeme.com
Mani Kant and Dr. Prabhat Kumar Sinha
For convenience local coordinate system is taken x1=0, x2=l that leads to
A ;B
A ;
A
A
A
A- - ; B
A
A
A- This can be written as
:
1 0
0 0
B
:
0 1
0 0
I J I
J D: E
1
:B
0 1 2 3
KAL = [ ]K:L, K:L = [ ]M KAL
Eq. (4.3) can be written as
N( ) = [O][ ]M KAL
N( ) = [P]KAL
Where [H] = [C] [A]-1
1 0
0 0
S 0 1
0 0 V
R−3 −2 3 −1U
U
[ ]M = R
R
U
1 −2 −1U
R2
Q T
[H] = [H1(x), H2(x), H3(x), H4(x)]
Where Hi(x) are called as Hermitian shape function whose values are given below
P ( )= 1−
- W
XW
+
Y
XY
,P ( ) =
−
X
W
+
Y
XW
,P ( )=
Stiffness calculation of gradual decrease Beam
- W
XW
−
Y
XY
, P- ( ) = −
W
X
+
Y
XW
The Euler-Bernoulli equation for bending of beam is
!+"
! = Z( , $)
$
Where y(x, t) is the transverse displacement of the beam is the mass density, EI is the
beam rigidity, q(x, t) is the external pressure loading, t and x represents the time and spatial
axis along the beam axis. We apply one of the methods of the weighted residual, Galerkin’s
method, to the above beam equation to develop the finite element formulation and the
corresponding matrices equations. The average weighted residual of Eq. (4.10) is
=[ "
$
+
( )
! − Z! \0 = 0
Where l is the length of the beam and p is the test function. The weak formulation of the
Eq. (4.11) is obtained from integration by parts twice for the second term of the equation.
Allowing discretization of the beam into number of finite elements gives
= ]D [ "
bc
Where
^_
\0 + [
^_
`=−
a=−
\
( )
( )d
( )
http://www.iaeme.com/IJMET/index.asp
dY e
dW e
d W
Y
0 − [ Z\0 E + 3−`\ − a
^_
0\
5 =0
0
is the shear force,
is the bending moment,
436
editor@iaeme.com
Study & Vibration Analysis of gradual decrease Beam by FEM
fg
is an element domain and n is the number of elements for the beam.
Applying the Hermitian shape function and the Galerkin’s method to the second term of
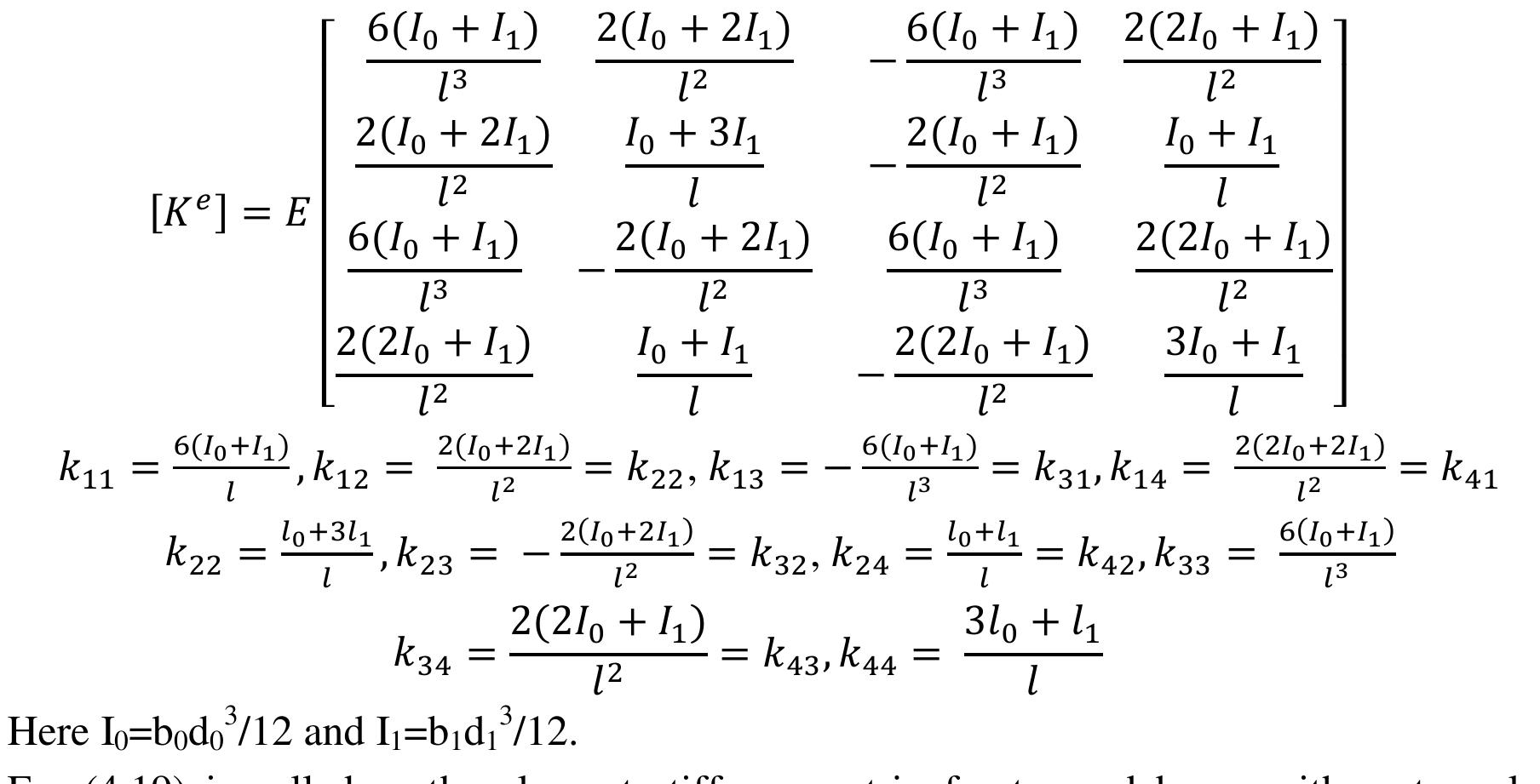
the Eq. (4.12) results in stiffness matrix of the gradual decrease Beam element with
rectangular cross section i.e.
X
[i ] = [[j]k
g
( )[j]0
[j] = KP " P " P " P-" L
And the corresponding element nodal degree of freedom vector
K0 g L = K B B Lk
In Eq. (4.14) double prime denotes the second derivative of the function.
Since the beam is assumed to be homogeneous and isotropic, so, E that is the elasticity
modulus can be taken out of the integration and then the Eq. (4.13) becomes
<
<- <1
<
<
<
< - < 1
ig = I
J
<- <- <-- <-1
<1 <1 <1- <11
Where kmn (m, n = 1, 4) are the coefficients of the element stiffness matrix.
Where
=<
<
X
=
[ ( )
P
P
0
Solving the above equation, we get the respective values of coefficients of the element
stiffness matrix for rectangular cross-sectioned beam.
6( + ) 2( + 2 )
6( + ) 2(2 + )
S
V
−
R
U
+3
+
2( + )
R 2( + 2 )
U
−
R
U
g
[i ] = R
6( + )
6( + )
2(2 + )U
2( + 2 )
R
U
−
R
U
+
3 +
2(2 + )
R2(2 + )
U
−
Q
T
<
=
m( n )
<
X
=
,<
X n-X
X
=
,<
( n
-
XW
= −
<-1 =
)
=< ,<
( n
XW
)
-
=−
= <- , <
2(2 + )
m( n )
1
XY
=
= <1- , <11 =
= <- , <
X nX
X
1
=
(
= <1 , <-- =
3 +
n
)
XW
m( n )
XY
= <1
Here I0=b0d03/12 and I1=b1d13/12.
Eq. (4.19) is called as the element stiffness matrix for tapered beam with rectangular
cross-sectioned area.
http://www.iaeme.com/IJMET/index.asp
437
editor@iaeme.com
Mani Kant and Dr. Prabhat Kumar Sinha
Mass matrix of gradual decrease Beam
Since, for dynamic analysis of beams, inertia force needs to be included. In this case,
transverse deflection is a function of x and t. the deflection is expressed with in a beam
element is given below
( , $) = P ( ) ($) + P ( )B ($) + P ( ) ($) + P- ( )B- ($)
ag = " D
-
-
-
1
1
The coefficients of the element stiffness matrix are
X
1
1
E
-1
-1-
11
= [ ( )[P]k [P] 0
=
(10 + 3 )
(15 + 7 )
9( + )
(7 + 6 )
S
V
35
420
140
420
R
U
(3 + 5 )
(6 + 7 )
( + ) U
R (15 + 7 )
R
U
420
840
420
280
[ag ] = " R
9( + )
(6 + 7 )
(10 + 3 )
(15 + 7 )U
R
U
140
420
35
420
R
U
( + )
(15 + 7 )
(5 + 3 ) U
R (6 + 7 )
Q
T
420
280
420
840
The above equation is called as consistent mass matrix, where the individual elements of
the consistent mass matrices are
=
=
XY (-
nt
w1
X(
-t
)
,
-
-1
=
)
n-
,
=
=
XW (m
1
1
XW ( t
=
nu
1
=
,
1
(7 + 6 )
= 1
420
And
XW ( t
nu
)
=
)
=
)
nu
-
,
1- ,
1
=
11
XY (
=
The equation of motion for the beam can be written as
[a]x0y z + [i]K0L = 0
=
-
n
w
XY (t
)
=
n-
w1
vX(
)
)
n
1
1
,
=
--
-
=
X(
,
n-
-t
)
,
We seek to find the natural motion of system, i.e. response without any forcing function.
The form of response or solution is assumed as
K0($)L = K∅Le}~•
Here {∅} is the mode shape (eigen vector) and ω is the natural frequency of motion. In
other words, the motion is assumed to be purely sinusoidal due to zero damping in the system.
The general solution turned out to be a linear combination of each mode as
K0&$'L c K∅ Le}~ • c K∅ Le}~W •
… … … . . cƒ K∅ƒ Le}~„ •
Here each constant (ci) is evaluated from initial conditions. Substituting Eq. (4.27) into
Eq. (4.25) gives
& / [a] [i]'K∅Le}~• 0
Using the above equation of motion for the free vibration the mode shapes and frequency
can be easily calculated.
http://www.iaeme.com/IJMET/index.asp
438
editor@iaeme.com
Study & Vibration Analysis of gradual decrease Beam by FEM
Numerical analysis
For numerical analysis a taper beam is considered with the following properties:
Material properties
Elastic modulus of the beam = 2.109e11 N/m2 Density = 7995.74 Kg/m3
Fundamental frequencies for free vibration analysis is calculated by using the equation of
motion described in the previous section for two end conditions of beam given below
1. One end fixed and one end free (cantilever beam)
2. Simply supported beam
Calculation of frequency of cantilever beam
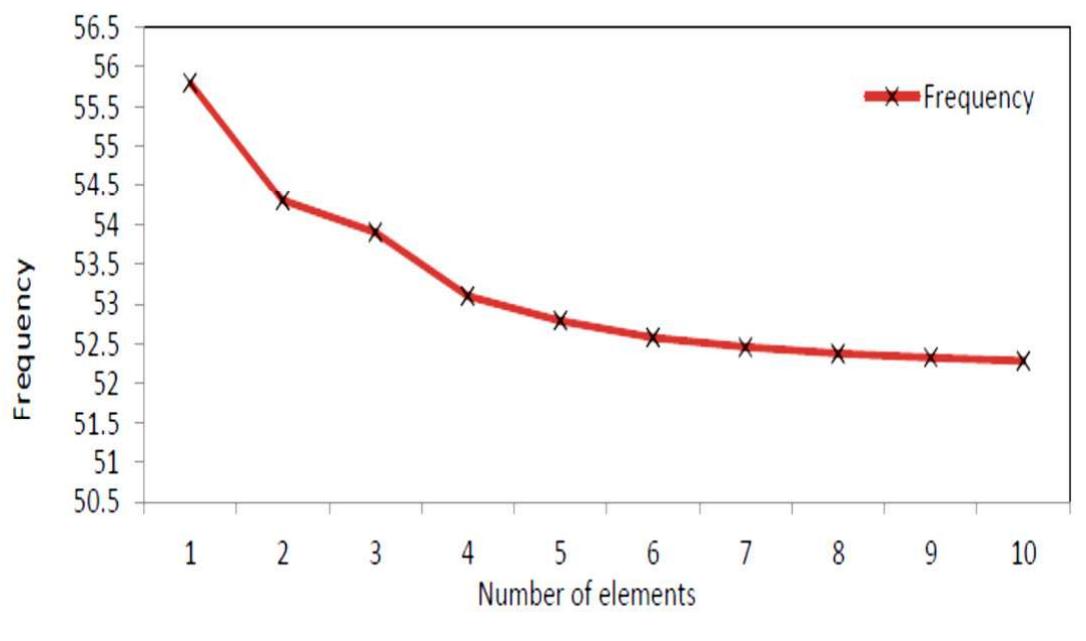
After discretizing to 10 numbers of elements, natural frequencies of the gradual decrease
Beam are calculated using MATLAB program and shown in Table 5.1. As we can see in Fig.
5.3 the frequency converges after discretizing to only four elements. The results are compared
with Mabie [1] and Gupta [9] who solved the final differential equation for the beam using
numerical method. The method described in here is less cumbersome than the conventional
methods.
Table 1 Frequencies of linearly tapered cantilever beam.
Frequency
(cycles/sec)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
Number of Elements
1
2
3
55.8
54.3
53.9
460.48 411.22 403.3
1288.5 1186.8
4652.9 2755.6
5198.1
11479.2
4
53.1
398.29
1178.6
2642.6
4440.8
7147.4
11345.8
20968.4
http://www.iaeme.com/IJMET/index.asp
5
6
7
8
9
52.79
52.58
52.46 52.38
52.33
395.82
394.4
393.61 393.16 392.68
1169.08 1163.8 1160.89 1159 1157.77
2334.3
2318
2308.2 2302
2298.6
3888.7 3879.1 3854.6 3837
3827.1
6536.36 5828.4 5813.5 5780
5754.6
9587.54 9037.5 8165.1 8137
8097.4
13910.9 12466.5 11940.2 10902 10851.5
19789.1 17045.5 15769.6 15240 14045.3
33176
23033
20661 19491 18933
30414
26849 24725 23628
48142
34445 31172 29222
43176 38075 35969
65882 56400 44015
54112 53412
64192 63813
69022
79985
439
10
52.29
392.4
1156.8
2296.1
3820.2
5737.1
8060.8
10805
13955
17595
23017
28178
34142
41217
49527
59179
70065
81661
94367
135776
editor@iaeme.com
Mani Kant and Dr. Prabhat Kumar Sinha
Figure 2 Convergence of fundamental natural frequency for cantilever beam
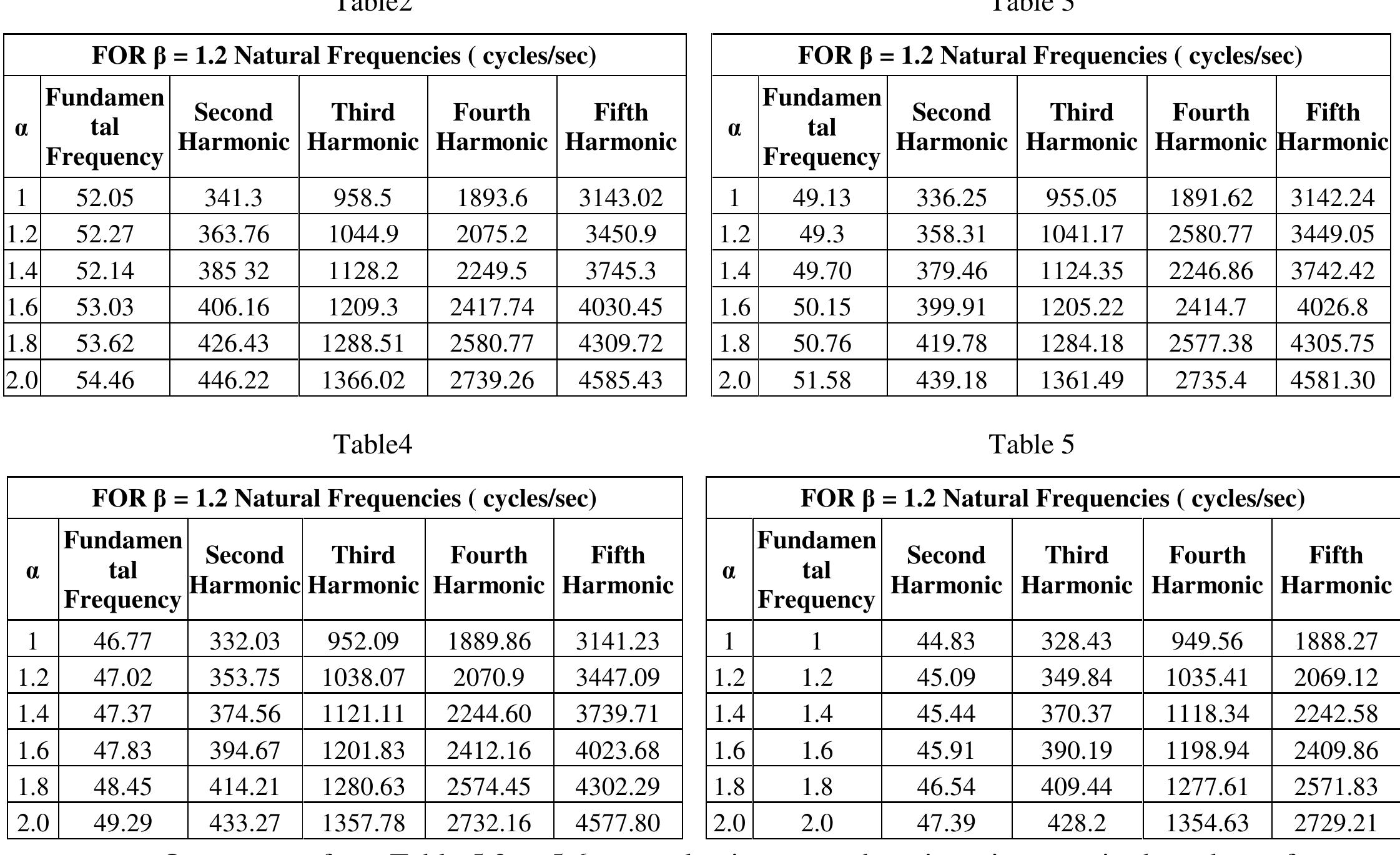
Effect of taper ratio on the frequency
For determining the effect of taper ratio on the frequency, different values of α (depth
variation) and β (width variation) varying from 1 to 2 are taken in consideration and shown in
Tables
Frequencies of Linearly Tapered Cantilever Beam for different values of α and β.
Table2
Table 3
FOR β = 1.2 Natural Frequencies ( cycles/sec)
α
Fundamen
Second
Third
Fourth
Fifth
tal
Harmonic Harmonic Harmonic Harmonic
Frequency
1
1.2
1.4
1.6
1.8
2.0
52.05
52.27
52.14
53.03
53.62
54.46
341.3
363.76
385 32
406.16
426.43
446.22
958.5
1044.9
1128.2
1209.3
1288.51
1366.02
1893.6
2075.2
2249.5
2417.74
2580.77
2739.26
3143.02
3450.9
3745.3
4030.45
4309.72
4585.43
FOR β = 1.2 Natural Frequencies ( cycles/sec)
α
1
1.2
1.4
1.6
1.8
2.0
Fundamen
Second
Third
Fourth
Fifth
tal
Harmonic Harmonic Harmonic Harmonic
Frequency
49.13
49.3
49.70
50.15
50.76
51.58
336.25
358.31
379.46
399.91
419.78
439.18
Table4
1
1.2
1.4
1.6
1.8
2.0
Fundamen
Second
Third
Fourth
Fifth
tal
Harmonic Harmonic Harmonic Harmonic
Frequency
46.77
47.02
47.37
47.83
48.45
49.29
332.03
353.75
374.56
394.67
414.21
433.27
952.09
1038.07
1121.11
1201.83
1280.63
1357.78
1891.62
2580.77
2246.86
2414.7
2577.38
2735.4
3142.24
3449.05
3742.42
4026.8
4305.75
4581.30
Table 5
FOR β = 1.2 Natural Frequencies ( cycles/sec)
α
955.05
1041.17
1124.35
1205.22
1284.18
1361.49
1889.86
2070.9
2244.60
2412.16
2574.45
2732.16
3141.23
3447.09
3739.71
4023.68
4302.29
4577.80
FOR β = 1.2 Natural Frequencies ( cycles/sec)
α
1
1.2
1.4
1.6
1.8
2.0
Fundamen
Second
Third
Fourth
Fifth
tal
Harmonic Harmonic Harmonic Harmonic
Frequency
1
1.2
1.4
1.6
1.8
2.0
44.83
45.09
45.44
45.91
46.54
47.39
328.43
349.84
370.37
390.19
409.44
428.2
949.56
1035.41
1118.34
1198.94
1277.61
1354.63
1888.27
2069.12
2242.58
2409.86
2571.83
2729.21
One can see from Table 5.3 to 5.6 as α value increases there is an increase in the values of
fundamental frequency, but the taper ratio β in the horizontal plane has a detrimental effect on
frequency.
http://www.iaeme.com/IJMET/index.asp
440
editor@iaeme.com
Study & Vibration Analysis of gradual decrease Beam by FEM
Mode shapes
To determine the effect of β and α on the amplitude of vibration, their values are varied (1 to
2) and mode shapes are calculated and shown in Fig.
Figure 3
Figure 4
Figure 5
Figure 6
Figure 7
Figure 8
http://www.iaeme.com/IJMET/index.asp
441
editor@iaeme.com
Mani Kant and Dr. Prabhat Kumar Sinha
Figure 9
Figure 10
There are four different modes shape for cantilever beam with constant width (β) and
variable depth ratio (α)
Maximum values of amplitude is taken for each mode and for different values of taper
ratios the % age reduction in amplitude with respect to no taper is calculated, As one can see
from Table 2 to 5, the effect of α on decreasing the amplitude is quite more than β.
4. CONCLUSIONS
This research work presents a simple procedure to obtain the stiffness and mass matrices of
tapered Euler’s Bernoulli beam of rectangular cross section. The proposed procedure is
verified by the previously produced results and method. The shape functions, mass and
stiffness matrices are calculated for the beam using the Finite Element Method, which
requires less computational effort due to availability of computer program. The value of the
natural frequency converges after dividing into smaller number of elements. It has been
observed that by increasing the taper ratio ‘α’ the fundamental frequency increases but an
increment in taper ratio‘β’ leads to decrement in value of fundamental frequency. Mode
shapes for different taper ratio has been plotted. Taper ratio‘α’ is more effective in decreasing
the amplitude in vertical plane, than β in the horizontal plane at higher mode. The above result
is of great use for structural members where high strength to weight ratio is required.
REFERENCES
[1]
[2]
[3]
[4]
[5]
[6]
H. H. Mabie & C. B. Rogers, Transverse vibrations of double-tapered cantilever beams,
Journal of the Acoustical Society of America 36, 463-469, 1964.
H. H. Mabie and C. B. Rogers, Transverse vibrations of tapered cantilever beams with end
support, Journal of the Acoustical Society of America, 44, 1739-1741, 1968.
G.R. Sharp, M.H. Cobble, Finite transform solution of the vibrating beam with ends
elastically restrained, Journal of the Acoustical Society of America, 45, 654–660, 1969.
W. Carnegie & J. Thomas, The coupled bending-bending vibration of pre-twisted tapered
blading, Journal of Engineering for Industry 94(1), 255 -267, 1972.
K.R. Chun, Free vibration of a beam with one end spring-hinged and the other free,
Journal of Applied Mechanics, 39, 1154–1155, 1972.
R.P. Goel, Vibrations of a beam carrying a concentrated mass, Journal of Applied
Mechanics, 40, 821–822, 1973.
http://www.iaeme.com/IJMET/index.asp
442
editor@iaeme.com
Study & Vibration Analysis of gradual decrease Beam by FEM
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15]
[16]
[17]
[18]
[19]
[20]
[21]
[22]
[23]
[24]
[25]
[26]
K.J. Bathe, E.L. Wilson, F.E. Peterson, A structural analysis system for static and
dynamic response of linear systems,” College of Engineering, University of California,
Report EERC 73-11, 1973.
R.C. Hibbeler, Free vibration of a beam support by unsymmetrical spring-hinges, Journal
of Applied Mechanics, 42, 501–502, 1975.
A. K. Gupta, Vibration Analysis of Linearly Gradual decrease Beam s Using FrequencyDependent Stiffness and Mass Matrices, thesis presented to Utah State University, Logan,
Utah, in partial fulfillment of the requirements for the degree of Doctor of Philosophy,
1975.
K. Kanaka Raju, B. P. Shastry, G. Venkateswarraa, A finite element formulation for the
large amplitude Vibrations of gradual decrease Beam s, Journal of Sound and Vibration,
47(4), 595-598 1976.
R. S. Gupta & S. S. Rao, Finite element Eigen value analysis of tapered and twisted
Timoshenko beams J. Sound Vibration, 56, 187-200, 1978.
C. D. Bailey Direct analytical solutions to non-uniform beam problems, Journal of Sound
and Vibration, 56(4), 501-507, 1978.
C. W. S. To, Higher order gradual decrease Beam finite elements for vibration analysis
Journal of Sound and Vibration, 63(I), 33-50, 1979.
J.H. Lau, Vibration frequencies of tapered bars with end mass, Journal of Applied
Mechanics, 51, 179–181, 1984
J.R. Banerjee, F.W. Williams, Exact Bernoulli-Euler static stiffness matrix for a range of
gradual decrease Beam -columns, International Journal for Numerical Methods in
Engineering 23, 1615-1628, 1986.
M.A. Bradford, P.E. Cuk, Elastic buckling of tapered mono-symmetric I-beams, Journal
of Structural Engineering ASCE 114 (5), 977-996, 1988.
E. Howard Hinnant, Derivation of a Tapered p-Version Beam Finite Element, NASA
Technical Paper 2931 AVSCOM Technical Report, 89-B-002, 1989.
K. M. Liew, M. K. Lim and C. W. Lim, Effects of initial twist and thickness variation on
the vibration behavior of shallow conical shells, Journal of Sound and Vibration, Volume
180, Issue 2, 16 February, 271–296, 1995.
T.D. Chaudhari, S.K. Maiti, Modelling of transverse vibration of beam of linearly variable
depth with edge crack, Engineering Fracture Mechanics, 63, 425-445, 1999.
N. Bazeos, D.L. Karabalis, Efficient computation of buckling loads for plane steel frames
with tapered members, Engineering Structures, 28, 771-775, 2006.
Mehmet Cem Ece, Metin Aydogdu, Vedat Taskin, Vibration of a variable cross- section
beam, Mechanics Research Communications, 34, 78–84, 2007.
B. Biondi, S. Caddemi, Euler-Bernoulli beams with multiple singularities in the flexural
stiffness, European Journal of Mechanics A-Solids, 26, 789-809, 2007.
J.B. Gunda, A.P. Singh, P.S. Chhabra and R. Ganguli, Free vibration analysis of rotating
tapered blades using Fourier-p super element, Structural Engineering and Mechanics, Vol.
27, No. 2 000-000, 2007.
A. Shooshtari & R. Khajavi, An efficient procedure to find shape functions and stiffness
matrices of non-prismatic Euler Bernoulli and Timoshenko beam elements, European
Journal of Mechanics, 29, 826-836c. 2010.
Tayeb Chelirem and Bahi Lakhdar, Dynamic study of a turbine tapered blade, Science
Academy Transactions on Renewable Energy Systems Engineering and Technology
(SATRESET), Vol. 1, No. 4, , ISSN: 2046-6404, (2011)
Reza Attarnejad and Ahmad Shahba, Basic displacement functions for centrifugally
stiffened gradual decrease Beam s, International Journal numerical Methods Biomedical
engineering, 27:1385–1397, 2011.
http://www.iaeme.com/IJMET/index.asp
443
editor@iaeme.com
Mani Kant and Dr. Prabhat Kumar Sinha
[27]
[28]
[29]
[30]
[31]
Reza Attarnejad, Ahmad Shahba, Dynamic basic displacement functions in free vibration
analysis of centrifugally stiffened gradual decrease Beam s, Meccanica, 46:1267– 1281,
2011.
P. Henri Gavin, Structural element stiffness matrices and mass matrices, Department of
Civil and Environmental Engineering CEE 541 Structural Dynamics, 2012. Fig. 2
Cantilever Beam of rectangular cross-section area with width and depth varying linearly.
Prince Kumar and Sandeep Nasier, An Analytic and Constructive Approach to Control
Seismic Vibrations in Buildings. International Journal of Civil Engineering and
Technology, 7(5), 2016, pp.103–110.
G. Thulasendra and U.K. Dewangan, Comparative Study of Vibration Based Damage
Detection Methodologies For Structural Health Monitoring, International Journal of Civil
Engineering and Technology, 8(7), 2017, pp. 846–857.
S. Jayavelu, C. Rajkumar, R. Rameshkumar and D. Surryaprakash, Design and Analysis
of Vibration and Harshness Control For Automotive Structures Using Finite Element
Analysis, International Journal of Civil Engineering and Technology, 8(10), 2017, pp.
1364–1370.
http://www.iaeme.com/IJMET/index.asp
444
editor@iaeme.com